Lieber Besucher, herzlich willkommen bei: We-Mod-It | Das Forum von Moddern für Modder. Falls dies Ihr erster Besuch auf dieser Seite ist, lesen Sie sich bitte die Hilfe durch. Dort wird Ihnen die Bedienung dieser Seite näher erläutert. Darüber hinaus sollten Sie sich registrieren, um alle Funktionen dieser Seite nutzen zu können. Benutzen Sie das Registrierungsformular, um sich zu registrieren oder informieren Sie sich ausführlich über den Registrierungsvorgang. Falls Sie sich bereits zu einem früheren Zeitpunkt registriert haben, können Sie sich hier anmelden.
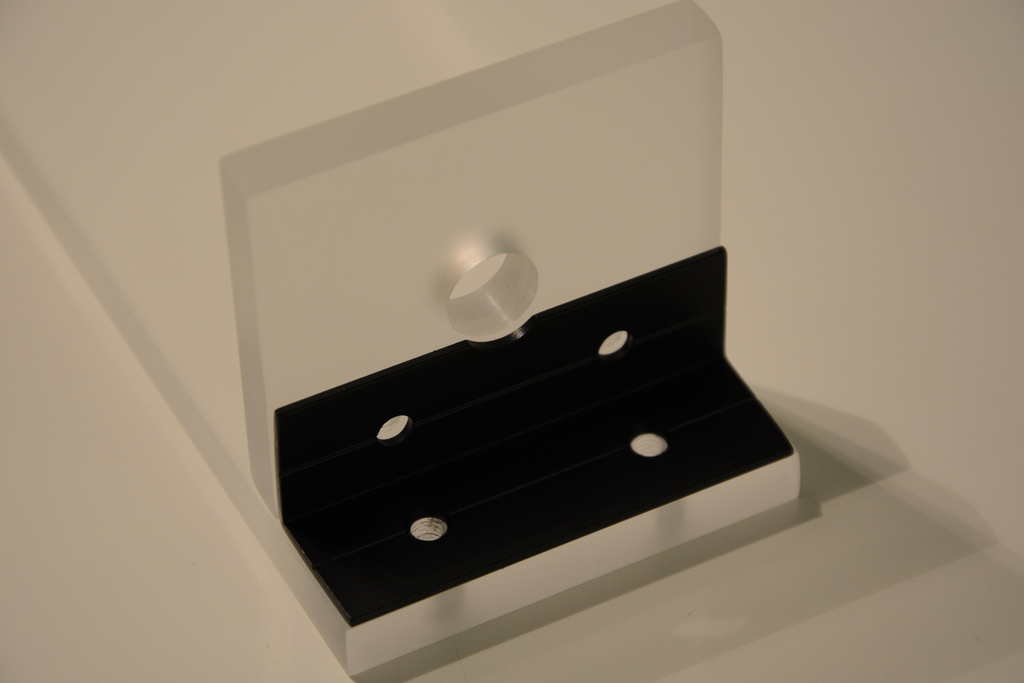
Schaut gut aus, aber stört das bei den Aufnahmen nicht wenn das etwas eiert? Oder dreht das dann so langsam das es kaum sichtbar ist?


Benutzerinformationen überspringen
Registrierungsdatum: 17. März 2010
Wohnort: Da wo der Berch wohnt
Beruf: Inginöööör und Freundinbeschäftiger
 Wird das vorletzte Update sein. Los geht's:
Wird das vorletzte Update sein. Los geht's:

 Mithilfe eines 2,54mm Gitters ging das relativ Problemlos. Mit dem Ergebnis bin ich sehr zufrieden. Das Platinenlayout funktioniert (meine größte Sorge, da ich alles per Hand auf einem Blatt Papier manuell entworfen habe, ohne org welche virtuellen Tests) und die Qualität ist für die erste richtige Platine zufriedestellend. Insgesamt haben wir 3 Versuche gebraucht, um zu dem Ergebnis zu kommen. Anfangs gab es Probleme mit der Tonermenge.
Mithilfe eines 2,54mm Gitters ging das relativ Problemlos. Mit dem Ergebnis bin ich sehr zufrieden. Das Platinenlayout funktioniert (meine größte Sorge, da ich alles per Hand auf einem Blatt Papier manuell entworfen habe, ohne org welche virtuellen Tests) und die Qualität ist für die erste richtige Platine zufriedestellend. Insgesamt haben wir 3 Versuche gebraucht, um zu dem Ergebnis zu kommen. Anfangs gab es Probleme mit der Tonermenge.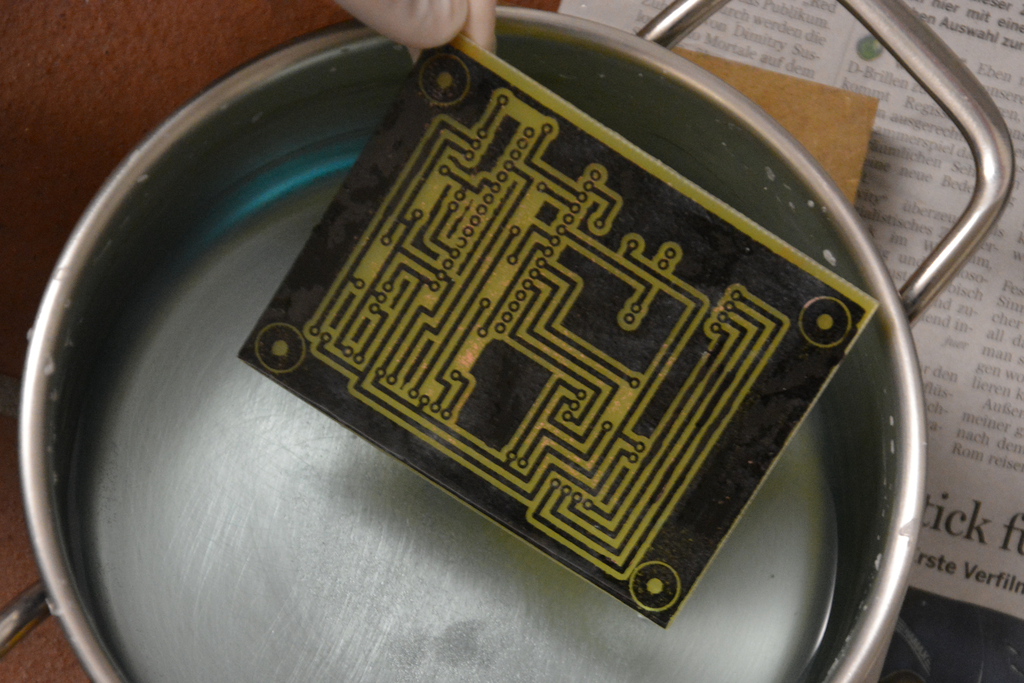
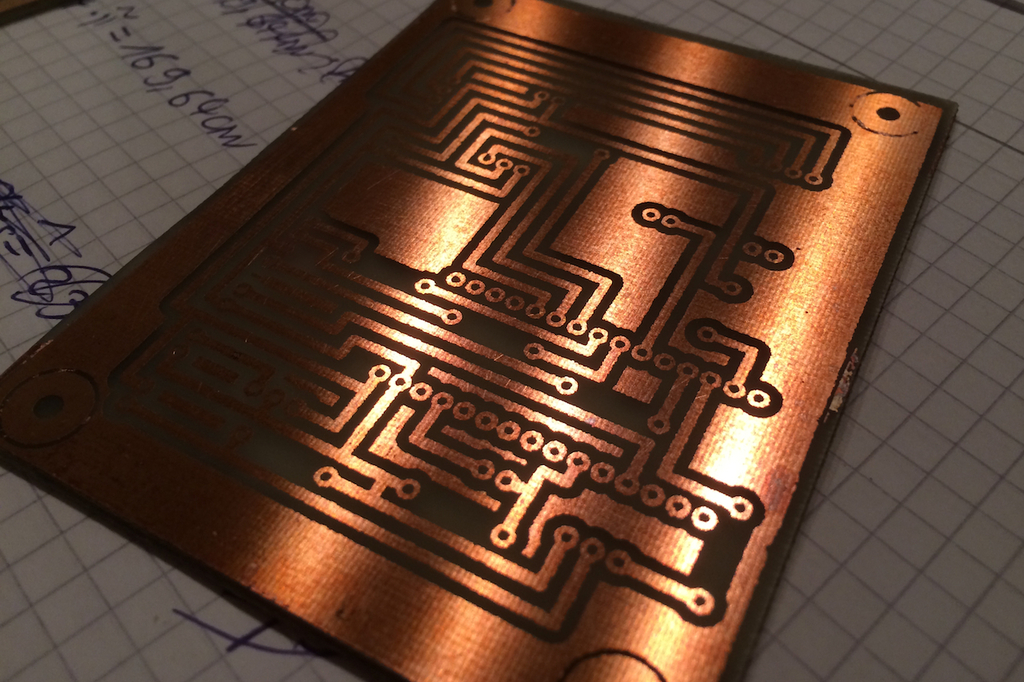
 Unser Lehrer betitelte unser Projekt unter anderem als "beeindruckend professionell". Das Paper, also die schriftliche Ausarbeitung hat zwar "nur" 14 Punkte bekommen, jedoch sind wir, in Anbetracht der Zeit, in der wir sie geschrieben haben, auch damit sehr zufrieden.
Unser Lehrer betitelte unser Projekt unter anderem als "beeindruckend professionell". Das Paper, also die schriftliche Ausarbeitung hat zwar "nur" 14 Punkte bekommen, jedoch sind wir, in Anbetracht der Zeit, in der wir sie geschrieben haben, auch damit sehr zufrieden. Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)

Benutzerinformationen überspringen
Registrierungsdatum: 17. März 2010
Wohnort: Da wo der Berch wohnt
Beruf: Inginöööör und Freundinbeschäftiger

Schaut richtig sauber aus.
Bitte skalier mal die Bilder auf ne 1024 Auflösung auf der langen seite. Danke.
Bilder habe ich neu skaliert. Lasse die meistens etwas größer, damit man sie sich in größerer Form angucken kann. Sie werden ja sowieso von der Forensoftware verkleinert.Also ich hab mal eure Abgabe bis Seite 9 druchgelesen. (Mehr hat er irgendwie auch nicht geladen - glaub aber, dass es das vollständige Dokument schon ist)
Dafür das es ein Schülerprojekt sein soll ist es verdammt gut. Die Projektumsetzung ist wirklich gut. Die Ausarbeitung und Verarbeitung ist weit über dem was von einem Schüler zu erwarten ist. Die Dokumentation ist auch super. Das TeX verwendet wurde find ich super! Sieht richtig professionell aus. Es gibt selbst Studenten und Wissenschaftler die kein TeX verwenden. Einfach nur klasse!
Es sind zwar hier und da ein paar Fehlerchen, die unwesentlich sind und auch die (minimal) zu späte Abgabe sollten keine Rolle spielen. Die Qualität und Umfang der Arbeit sind so gut und so über dem was zu erwarten ist, dass du dich nicht mit weniger als der vollen Punktzahl zufrieden geben solltest.
Aber was anderes... fragt mal euren Lehrer, ob er sich mal ein bisschen Zeit für euch nehmen kann. Dann geht ihr mal das Ganze nochmal durch und bereitet es nochmal auf und meldet es für ein paar Schülerwettbewerbe an. Da ist was drin. Ohne Scheiß. Vielleicht kannst du ja auch mal mit deinem Lehrer, bzw. der Schulleitung reden, ob du das Projekt vielleicht auf ein paar Messen (Maker Messen, Jugend Forscht, Photographiemessen) zeigen kannst. Ich denke deine Schule kann stolz auf die geleistete Arbeit sein. Vielleicht kann sie ja für eure Gruppe eine Möglichkeit finden kann damit ihr das Ganze mal zeigen könnt. Wäre doch schade, wenn die Arbeit in Form einer .pdf in einer Dropbox im Internet endet. Habt ihr an euer Schule einen Freundeskreis, oder Fördermittel für solche Sachen?
Hut ab!
So long :0)


Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)
Benutzerinformationen überspringen
Registrierungsdatum: 17. März 2010
Wohnort: Da wo der Berch wohnt
Beruf: Inginöööör und Freundinbeschäftiger
Was genau meinst du für Schülerwettbewerbe? Ich hab da gerade nichts richtiges im Kopf. Über Jugend Forscht habe ich aber auch schon nachgedacht :/ Da müssen wir nochmal ein bisschen recherchieren. "Fördermittel" und co gibt es an unserer allgemeinbildenden Schule leider nicht. Vielleicht sollte ich aber wirklich mal das Gespräch mit unserem Schulleiter suchen...
). Von Forschungsgemeinschaften, Kultusministerium, Hochschulen und Unis kannst du auch mal schauen. Dann gibt es noch lauter Stipendien für gute Arbeiten, das dürfte aber auch mehr in deinem eigenen Interesse sein, aber auch die Schule kann sich damit rühmen, wenn gute Stipendien an ihre Schüler verteilt werden. ).
).Benutzerinformationen überspringen
Registrierungsdatum: 21. Februar 2012
Wohnort: Nürnberg
Beruf: Code-Künstler
Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)
Benutzerinformationen überspringen
Registrierungsdatum: 17. März 2010
Wohnort: Da wo der Berch wohnt
Beruf: Inginöööör und Freundinbeschäftiger
Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)

Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)
Benutzerinformationen überspringen
Registrierungsdatum: 13. November 2012
Wohnort: Bad Salmoden- Stallfinster
Beruf: Steuerungsprogrammierer
)  . Wenn ihr das schon gemacht habt, dann hab ich nichts gesagt
. Wenn ihr das schon gemacht habt, dann hab ich nichts gesagt Wenn man jetzt Böswillig wäre könnte man dir diese Aussage zuschreiben, und auch wenn sie natürlich richtig sein kann, kann es jemanden geben der dir daraus einen Strick drehen will.
Zitat
Die Erde, sowie auch andere Planeten unseres Sonnensystems, stehen nicht still an einer Postition, sondern folgen bestimmten Gesetzmäßigkeiten. Sie bewegen sich aufeiner elliptischen Bahn um die Sonne herum.
Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)
Benutzerinformationen überspringen
Registrierungsdatum: 13. November 2012
Wohnort: Bad Salmoden- Stallfinster
Beruf: Steuerungsprogrammierer
|
|
Quellcode |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 |
/*
StativoStativo Firmware 0.9.5
Stand: 10.01.2014 2:21
Legende der Status LED:
GRUEN: Betriebsbereit. Motorsteuerung aktiv. Auf Aktion durch Nutzer wartend.
GELB: Aktiv. Anfahren der Startposition/Standbyeposition.
ORANGE: Aktiv. Startposition angefahren. Start der Nachfuehrung nach CAMIntervall.
ROT: Aktiv. Nachfuehrung und Kamerasteuerung aktiv.
BLAU: Pausiert. Motorueberhitzung. Luefterdrehzahl auf 100%. Wiederherstellung der Betriebstemperatur. Anfahren der Startposition nach Abkuehlung.
by Simon Krause und Alexander Schulz
*/
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
#include "OneButton.h" //OneButton Bibliothek implementiert
#include "multiCameraIrControl.h" //multiCameraIrControl Bibliothek implementiert
#include "AccelStepper.h" //AccelStepper Bibliothek implementiert
#include "math.h" // Math Bilibothek implementiert
typedef enum {
ACTION_NONE, //Steuerung aus - LEDs aus
ACTION_ON, //Steuerung betriebsbereit - gruene LED ein
ACTION_1, //Steuerung aktiv - Nachfuehrung betreibsbereit/aktiv - gelbe/orange/rote LED ein
ACTION_2, //Motor auf Standbyestellung - gelbe LED ein
}
MyActions;
MyActions nextAction = ACTION_NONE; //Steuerung bei Start aus
#define EVER (;;)
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
//---------------------------KALIBRIERUNG----------------------------
long startposition = 41500; //Startposition in Mikroschritten
long runposition = -56000; //Anschlag der Nachuehrung in Mikroschritten
int VR = 9; //Geschwindigkeit der Nachfuehrung
int VB= 2500; //Geschwindigkeit der Positionsanfahrung
unsigned long IRIntervall = 60000; //Intervall der IR-LED
unsigned long IRIntervallPause = 1000; //Zeit bis zur erneuten Ausloesung
unsigned int CAMIntervall = 15000; //Zeit bis zur Aktivierung der Nachfuehrung
int maxtemp = 50; //Maximale Temperatur des Spannungsreglers
float fanmintemp = 27; //minimale Temperatur der stufenlosen Lueftersteuerung
float fanmaxtemp = 35; //maximale Temperatur der stufenlosen Lueftersteuerung
//------------------------------MOTOR---------------------------------
AccelStepper stepper(1,3,2); //Motor Pins an 2 und 3
long steps; //Speicherung der aktuellen Position
boolean counted = false; //Hilfvariable fuer die Rotatefunktion
float rotatevelo; //Geschwindigkeit des Motors
int rotatecounter = 0; //Hilfvariable fuer die Rotatefunktion
//-------------------------HILFSVARIABLEN-----------------------------
int i; //Variable zur Aktivierung einzelner Sub-Aktionen
int status; //Variable zur Aktivierung/Deaktivierung einzelner Aktionen
unsigned long previousmillis = 0; //Hilfsvariable fuer Steuerung der IR-LED
unsigned long pausemillis = 0; //Hilfsvariable fuer Steuerung der IR-LED
int photo = 0; //Anzahl der aufgenommenen Fotos
int lastphoto = 1; //Hilfsvariable fuer Steuerung der erneuten Ausloesung
unsigned long PIntervall; //Hilfsvariable fuer verzoegerte Nachfuehrung
//------------------------LUEFTERSTEUERUNG-----------------------------
boolean fanstatus = true; //Lueftersteuerung ein- oder ausschalten
float printtemp; //Aktuelle Temperatur
int fandiftemp = fanmaxtemp - fanmintemp; //Differenz zwischen fanmaxtemp und fanmintemp fuer stufenlose Lueftersteuerung
boolean overheat = false; //Hilfvariable fuer Steuerung bei Ueberhitzung
//--------------------------STATUSAUSGABE------------------------------
unsigned long starttime;
unsigned long currentmillis;
int printsec; //Gesamtzeit der Nachfuehrdauer in Sekunden
//--------------------------KAMERASTEUERUNG----------------------------
Nikon SNikon(4); //IR LED fuer Nikon an PIN 4
Canon SCanon(4); //IR LED fuer Canon an PIN 4
Pentax SPentax(4); //IR LED fuer Pentax an PIN 4
Olympus SOlympus(4); //IR LED fuer Olympus an PIN 4
Sony SSony(4); //IR LED fuer Sony an PIN 4
//--------------------------EIN/AUSGAENGE------------------------------
OneButton button(A0, true); //Taster an PIN A1
#define DIR_PIN 2 //Richtung Easydriver an PIN 2
#define STEP_PIN 3 //Schritt Easydriver an PIN 3
int blue = 5; //blaue LED an PIN 5
int green = 6; //gruene LED an PIN 6
int mstop = 7; //Motorstop
int red = 9; //rote LED an PIN 9
//-----------------------------RGB-LED---------------------------------
int redvalue;
int greenvalue;
int bluevalue;
float brightness;
float fade;
float photobrightness = 0.25;
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void setup() {
Serial.begin(9600); //Serialoutput auf Port 9600 aktiviert
pinMode(DIR_PIN, OUTPUT); //PIN 2 als Output
pinMode(STEP_PIN, OUTPUT); //PIN 3 als Output
pinMode(5, OUTPUT); //PIN 5 als Output
pinMode(6, OUTPUT); //PIN 6 als Output
pinMode(7, OUTPUT); //PIN 7 als Output
pinMode(8, OUTPUT); //PIN 8 als Output
pinMode(9, OUTPUT); //PIN 9 als Output
pinMode(10, OUTPUT); //PIN 10 als Output
pinMode(11, OUTPUT); //PIN 11 als Output
stepper.setMaxSpeed(abs(4500)); //maximale Geschwindigkeit des Motors
button.attachClick(myClickFunction); //Klick-Funktion implementiert
button.attachDoubleClick(myDoubleClickFunction); //Doppelklick-Funktion implementiert
Serial.println("==== StativoStativo v1.0 =========================");
Serial.println("Bedienungshilfe kann mit 'm' eingeblendet werden.");
} //Ende setup
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void loop() {
steps = stepper.currentPosition(); //Aktuelle Position des Motors in Variable speichern
unsigned long now = millis(); //Aktuelle Zeit in Variable speichern
button.tick(); //Taster ueberpruefen
printtemp = Thermister(analogRead(2)); //Temperatur kontinuierlich aktualisieren
if (Serial.available() > 0) //Steuerung ueber Serial
{
int comand = Serial.read(); //Daten in comand speichern
if (comand == 49) // comand auswerten und Aktion durchfuehren; 49 = 1
{
myClickFunction();
}
if (comand == 50) // comand auswerten und Aktion durchfuehren; 50 = 2
{
myDoubleClickFunction();
}
if (comand == 51) // comand auswerten und Aktion durchfuehren; 51 = 3
{
IRIntervall = 60000;
printtime("Belichtungszeit",float(IRIntervall/1000));
}
if (comand == 52) // comand auswerten und Aktion durchfuehren; 52 = 4
{
if (IRIntervall > 20000) {
IRIntervall += -20000;
printtime("Belichtungszeit",float(IRIntervall/1000));
}
else {
Serial.println("Minimale Belichtungszeit von 20 Sekunden erreicht.");
}
}
if (comand == 53) // comand auswerten und Aktion durchfuehren; 53 = 5
{
IRIntervall += 20000;
printtime("Belichtungszeit",float(IRIntervall/1000));
}
if (comand == 54) // comand auswerten und Aktion durchfuehren; 54 = 6
{
IRIntervall += 60000;
printtime("Belichtungszeit",float(IRIntervall/1000));
}
if (comand == 105) // comand auswerten und Aktion durchfuehren; 105 = i
{
info();
}
if (comand == 109) // comand auswerten und Aktion durchfuehren; 109 = m
{
manual();
}
}
//---------------------------LUEFTERSTEUERUNG---------------------------
if (fanstatus == true) {
if (printtemp >= fanmintemp && printtemp <= fanmaxtemp) { //Stufenlose Lueftersteuerung
analogWrite(10,((floor(185/fandiftemp)*(printtemp-fanmintemp) )+70));
}
else if (printtemp > fanmaxtemp) { //100% Drehzahl bei erhoeter Temperatur
analogWrite(10,255);
}
else {
analogWrite(10,0);
}
}
//-------------------------TEMPERATURAKTIONEN---------------------------
if (printtemp > maxtemp) { //Motorstopp bei Ueberhitzung - blaue LED ein
digitalWrite(mstop, LOW); //Motorsteuerung aus
RGB(0,0,255,1.0); //Status-LED auf blau
digitalWrite(11, HIGH); //Buzzer ein
if (overheat == false) { //einmalige Ausgabe der Ueberhitzung
Serial.print("Achtung Ueberhitzung! ");
Serial.print("Temperatur: ");
Serial.print(printtemp);
Serial.print(char(176));
Serial.println("C");
if (lastphoto == photo) { //ggf. Abbruch der Belichtung
SNikon.shutterNow();
/*SCanon.shutterNow();
SPentax.shutterNow();
SOlympus.shutterNow();
SSony.shutterNow();*/
photo = 0; //Zuruecksetzen der Variablen
lastphoto = 1;
}
overheat = true;
status = 0;
rotatecounter = 0;
i = 4;
nextAction = ACTION_NONE;
}
}
if (overheat == true && printtemp > (maxtemp-5) && (millis() % 1000 == 0)) { //regelmaessige Ausgabe der Temperatur bei Ueberhitzung
Serial.print("Temperatur: ");
Serial.print(printtemp);
Serial.print(char(176));
Serial.println("C");
}
if (overheat == true && printtemp < (maxtemp-5)) { //Aktion nach Wiederherstellung der Betriebstemperatur
Serial.println("Betriebstemperatur wiederhergestellt!");
digitalWrite(11, LOW); //Buzzer ausschalten
nextAction = ACTION_2; //Steuerung betriebsbereit machen
status = 5;
i = 3;
overheat = false;
}
//-------------------------ACTION_NONE--------------------------
if (nextAction == ACTION_NONE) { //Steuerung aus - LEDs aus
if (i == 3) {
RGB(0,0,0,1.0); //Status LED aus
digitalWrite(mstop, LOW); //Motorsteuerung aus
Serial.println("Steuerung aus.");
i=4;
}
}
//--------------------------ACTION_ON---------------------------
else if (nextAction == ACTION_ON) { //Steuerung betriebsbereit - gruene LED ein
if (i == 3) {
Serial.println("Steuerung betriebsbereit. Bitte gewuenschte Belichtungszeit einstellen. (Standart: 1 Minute)");
RGB(0,255,0,1.0); //Status LED auf gruen
digitalWrite(mstop, HIGH); //Motorsteuerung an
status=0;
photo=0;
i=4;
}
}
//--------------------------ACTION_1----------------------------
else if (nextAction == ACTION_1) { //Steuerung aktiv - gelbe/orange/rote LED ein
if (i < 5){ //Anfahren der Startposition - Warten auf Nachfuehrung
if (status == 0) {
Serial.println("Startstellung anfahren.");
RGB(255,100,0,1.0); //Status-LED auf gelb
status = 1;
}
if (status == 1) {
rotate(VB,startposition); //Anfahren der Startposition von der Standbyestellung
}
if (status == 2) { //Warten auf Nachfuehrung
Serial.print("Nachfuehrung betriebsbereit. Kamera bereit machen. ");
printtime("Belichtungszeit",float(IRIntervall/1000));
PIntervall = millis();
RGB(255,25,0,1.0); //Status-LED auf orange
photo = 0;
lastphoto = 1;
status = 3;
}
if (status == 3) { //Wartezeit bis Nachfuehrung
if(millis() - PIntervall > CAMIntervall) {
previousmillis = millis();
Serial.println("Nachfuehrung aktiv.");
starttime = millis();
i=5;
status=4;
}
}
}
else if (i == 5) { //Nachfuehrung aktiv - Kamerasteuerung aktiv
currentmillis = millis();
printsec = round((millis() - starttime)/1000);
if(currentmillis - previousmillis > IRIntervall){ //Kamerasteuerung und Statusausgabe
previousmillis = currentmillis;
SNikon.shutterNow(); //Ausloesen der Kamera
/*SCanon.shutterNow();
SPentax.shutterNow();
SOlympus.shutterNow();
SSony.shutterNow();*/
photo == photo++; //Anzahl der Fotos um 1 erhoeen
}
if ((currentmillis - previousmillis > IRIntervallPause) && (photo != lastphoto)) {
previousmillis = currentmillis;
lastphoto = photo;
SNikon.shutterNow(); //erneutes Ausloesen der Kamera
/*SCanon.shutterNow();
SPentax.shutterNow();
SOlympus.shutterNow();
SSony.shutterNow();*/
info();
}
if (status == 4){
rotate(VR,runposition); //Nachfuehrung ab Startposition zum Anschlag
}
if( (currentmillis - previousmillis > (IRIntervall-5000)) && (currentmillis - previousmillis < (IRIntervall-250))) {
fade = float(IRIntervall-250-currentmillis+previousmillis)/4750;
RGB((fade*255),0,((1.0-fade)*255),photobrightness);
} else if( (currentmillis - previousmillis > (IRIntervall-250)) && (currentmillis - previousmillis < IRIntervall)) {
fade = float(IRIntervall-currentmillis+previousmillis)/250;
RGB(((1.0-fade)*255),0,(fade*255),photobrightness);
} else {
RGB(255,0,0,photobrightness);
}
}
}
//--------------------------ACTION_2----------------------------
else if (nextAction == ACTION_2) { //Anfahren der Standbyestellung - gelbe LED ein
if (i == 3) {
RGB(255,100,0,1.0);
if (status == 5) {
Serial.println("Standbyestellung anfahren.");
status = 6;
if (lastphoto == photo) { //ggf. Abbruch der Belichtung
SNikon.shutterNow();
/*SCanon.shutterNow();
SPentax.shutterNow();
SOlympus.shutterNow();
SSony.shutterNow();*/
photo = 0; //Zuruecksetzen der Variablen
lastphoto = 1;
}
}
if (status == 6) {
rotate(VB,0); //Anfahren der Standbyestellung
}
}
else if (i==4){ //Steuerung nach Anfahren der Standbyestellung betriebsbereit
myDoubleClickFunction();
}
}
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void myClickFunction() { //Aktionswechsel bei Klick
i=3;
if (nextAction == ACTION_NONE){
nextAction = ACTION_ON;
}
else {
nextAction = ACTION_NONE;
}
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void myDoubleClickFunction() { //Aktionswechsel bei Doppelklick
i=3;
rotatecounter = 0;
if (nextAction == ACTION_ON) {
status = 0;
nextAction = ACTION_1;
}
else if (nextAction == ACTION_1) {
status = 5;
Serial.println("Nachfuehrung beendet.");
nextAction = ACTION_2;
}
else if (nextAction == ACTION_2) {
nextAction = ACTION_ON;
}
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
double Thermister(float RawADC) { //Funktion zur Temperaturbestimmung
double Temp;
Temp = log(((10240000/RawADC) - 10000));
Temp = 1 / (0.001129148 + (0.000234125 + (0.0000000876741 * Temp * Temp ))* Temp );
Temp = Temp - 273.15; //Wert in Celsius konvertieren
return Temp;
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void rotate(float velo, long GoToStep) { //Funktion zur Steuerung des Motors
if (rotatecounter == 0) { //einmaliger Ablauf vor Aktion
digitalWrite(mstop, HIGH); //Motorsteuerung ein
counted = false;
rotatecounter = 1;
if (GoToStep <= steps) {
rotatevelo = -1 * velo;
}
else {
rotatevelo = velo;
}
}
if (rotatevelo < 0.0) { //Bedingung fuer negative Geschwindigkeit
if (GoToStep <= steps) {
stepper.setSpeed(rotatevelo);
stepper.runSpeed();
}
else {
counted = true;
}
}
else if (rotatevelo > 0.0) { //Bedingung fuer positive Geschwindigkeit
if (GoToStep >= steps) {
stepper.setSpeed(rotatevelo);
stepper.runSpeed();
}
else {
counted = true;
}
}
if (counted == true) { //Aktionen nach Steuerung
digitalWrite(mstop, LOW); //Motorsteuerung aus
rotatecounter = 0;
if(status == 1) {
status = 2;
Serial.println("Startstellung angefahren.");
}
else if (status == 6) {
status = 0;
i = 4;
Serial.println("Standbyestellung angefahren.");
}
else if(status == 4) {
myDoubleClickFunction();
}
}
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void info() {
Serial.println("==== Info ========================================");
Serial.print("Anzahl Fotos: ");
Serial.println(photo);
printtime("Belichtungszeit",float(IRIntervall/1000));
printtime("Verbleibende Belichtungszeit",float( (IRIntervall-currentmillis+previousmillis)/1000));
Serial.print("Temperatur: ");
Serial.print(printtemp);
Serial.print(char(176));
Serial.println("C");
}
//------------------------------------------------------------------------------------------------------
//------------------------------------------------------------------------------------------------------
void RGB(int redvalue, int greenvalue, int bluevalue, float brightness) {
analogWrite(green, int(round(greenvalue*brightness)));
analogWrite(blue, int(round(bluevalue*brightness)));
analogWrite(red, int(round(redvalue*brightness)));
}
void manual(){
Serial.println("==== Bedienungshilfe =============================");
Serial.println("-- Moegliche Serialeingaben ----------------------");
Serial.println(" Simulierter Klick | 1 |");
Serial.println(" Simulierter Doppelklick | 2 |");
Serial.println(" Belichtungsdauer auf 1 Minute setzen | 3 |");
Serial.println(" Belichtungsdauer um 20 Sekunden verkuerzen | 4 |");
Serial.println(" Belichtungsdauer um 20 Sekunden verlaengern | 5 |");
Serial.println(" Belichtungsdauer um 1 Minute verlaengern | 6 |");
Serial.println(" Info | i |");
Serial.println(" Bedienungshilfe/Manual | m |");
/* Serial.println("-- Moegliche Aktionen ----------------------------");
Serial.println("| | Steuerung aus");
Serial.println("| aus | K: Anschalten der Steurung");
Serial.println("| | DK: -");
Serial.println("\n| | Steuerung an");
Serial.println("| gruen | K: Ausschalten der Steurung");
Serial.println("| | DK: Starten der Nachfuehrung");
Serial.println("\n| | Startstellung anfahren");
Serial.println("| gelb | K: Ausschalten der Steurung");
Serial.println("| | DK: Abbruch der Nachfuehrung");
Serial.println("\n| | Warten auf Kamerakonfiguration");
Serial.println("| orange | K: Ausschalten der Steurung");
Serial.println("| | DK: Abbruch der Nachfuehrung");
Serial.println("\n| | Nachfuehrung aktiv");
Serial.println("| rot | K: Ausschalten der Steurung");
Serial.println("| | DK: Abbruch der Nachfuehrung");
Serial.println("\n| | Motorueberhitzung");
Serial.println("| blau | K: Ausschalten der Steurung");
Serial.println("| | DK: -");*/
}
void printtime(String text,int seconds) {
Serial.print(text);
Serial.print(": ");
if (float( (seconds % 86400) /3600) != 0){
Serial.print(float( (seconds % 86400) /3600));
if (float( (seconds % 86400) /3600) == 1) {
Serial.println(" Stunde ");
} else {
Serial.println(" Stunden ");
}
}
if (float( (seconds % 3600) /60) != 0){
Serial.print(float( (seconds % 3600) /60),0);
if (float( (seconds % 3600) /60) == 1){
Serial.print(" Minute ");
} else {
Serial.print(" Minuten ");
}
}
if (float(seconds % 60 != 0)) {
Serial.print(float(seconds % 60),0);
if (float(seconds % 60) == 1) {
Serial.print(" Sekunde");
} else {
Serial.print(" Sekunden");
}
}
Serial.print("\n");
}
|
Benutzerinformationen überspringen
Registrierungsdatum: 18. Juli 2009
Name: Patrick Betz
Wohnort: Simbach bei Landau a. d. Isar
Beruf: Kraftfahrer (Gelernter Schreiner)
Benutzerinformationen überspringen
Registrierungsdatum: 13. November 2012
Wohnort: Bad Salmoden- Stallfinster
Beruf: Steuerungsprogrammierer
Das kommt drauf an zu was die Bilder gedacht sind. Wenn du sie verwendest um etwas zu erklären, dann sollten sie im nahe am Text sein. Wenn sie nur dazu dienen dem geneigten Leser zu zeigen wie das hier beschriebene Bauteil aussieht, kann es in den Anhang. Ich bin z.B. in meinem Theorieteil auf die Herleitung der Maxwellchen Gleichungen eingegangen und zur besseren Verständlichkeit habe ich noch Zeichnungen dazu eingefügt. Diese in den Anhang zu packen wäre nutzlos gewesen, da diese dort nichts zu suchen haben, denn sie sollen ja die Mathematische Herleitung und meine Umschreibung der Bedeutung verständlicher machen.
Die Sache mit den Bildern im Anhang habe ich anders gelernt. Bei mehr als ca. 5 Bildern sollte man die Bilder alle in einen Anhang packen, damit man z.B. direkte Vergleiche von Bildern machen kann ohne tausend
mal umzublättern etc.
.Dort würde ein Verweis auf eine Gleichung gut tun, z.B. Jeanssche Kriterium, dargestellt in Gleichung XY, erfüllen ....
jedoch das sogenannte Jeanssche Kriterium erfüllen, welches eine größere Eigengravitation als den vorhandenen Druck erfordert.
Somit wird es einfacher verständlich. Was passiert wenn einer das Jeannssche Kriterium nicht kennt, für den steht da eine Gleichung die das Kriterium darstellen kann, oder halt nicht. Auch erwähnst du die Werte von M nicht ab der es zu einer Sternenbildung kommt. Wenn es sich um die Masse m handelt, hätte dort der kleine Buchstabe stehen sollen. Dafür gäbe es in der Klausur bei meinem Physik Prof beispielsweise Punktabzüge
\begin{equation}
Formel
\end{equation}
.© 2011-2014 We-Mod-It.com | Das Forum von Moddern für Modder | © Design by Jama